
近日,我院牟宗高副教授在国际权威期刊《IEEE Transactions on Systems, Man, and Cybernetics:Systems》上发表学术论文《A Spatial Biarc Method for Inverse Kinematics and Configuration Planning of Concentric Cable-Driven Manipulators》(DOI: 10.1109/TSMC.2021.3092012),针对同轴绳驱机械臂在咽喉等狭小空间内灵巧运动的问题,提出了应用空间双圆弧法实现其逆运动学求解与构型规划的新思路。该研究得到了国家自然科学基金等项目的支持。
据悉,《IEEE Transactions on Systems, Man, and Cybernetics:Systems》是国际自动化与控制系统领域中重要学术期刊,长期位于中科院计算机科学和工程技术等学科一区,也是相关领域的Top期刊,2021年影响因子为13.451,当年期刊的论文录用率约为10%。
论文简介:
同轴绳驱机械臂在咽喉等狭小空间内工作具有极高的灵活性。然而,它的逆运动学和构型规划非常复杂。针对这一问题作者提出了空间双圆弧方法。该方法的显着特点是:输入同轴绳驱机械臂在三维空间中的位置和方向向量,输出用于控制同轴绳驱机械臂在三维空间中的参数及构型。这种方法具有以下三个特点:首先,同时考虑了初始端和末端的位置和方向。其次,通过改变末端方向向量可以调整同轴绳驱机械臂重叠部分和分离部分的长度比例。再次,通过判断方向向量的角度值,可以预先确定整个同轴绳驱机械臂的空间构型是C型还是S型。该方法实现了同轴绳驱机械臂空间构型的参数化,便于直观地控制同轴绳驱机械臂在狭小空间内灵巧运动。仿真和实验结果验证了空间双圆弧法应用于同轴绳驱机械臂逆运动学求解及构型规划的有效性。
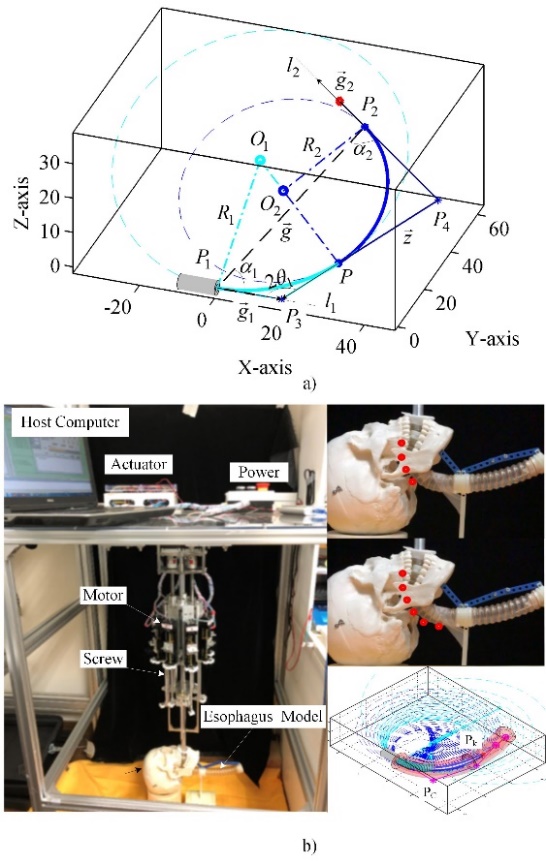
同轴绳驱机械臂咽喉检查的仿真与实验